The Moon as a diagnostic tool for microwave sensors
Posted on
by M. Burgdorf, T. Lang, S. Michel, S. A. Buehler, and I. Hans
The upper tropospheric humidity (UTH) is an essential climate variable that is required to monitor the global water vapor climate feedback and hence to understand changes in atmospheric dynamics associated with global warming. It is best measured at mm wavelengths from space, where the presence of clouds is less of a problem than in the infrared. Such observations with microwave humidity sounders began already in the early 1990s with instruments that were optimized for the 183-GHz line in combination with two window channels at lower frequencies.
The UTH can vary considerably within a few hours, but the trends caused by climate change manifest themselves as small changes over decades. Detecting them with microwave sensors in space makes high demands on the long-term stability of their flux calibration, which are difficult to meet with their on-board calibration target, whose own temperature calibration might slightly drift over the duration of the mission. It is therefore desirable to employ a second invariable reference in order to check the stability of the flux calibration: the Moon.
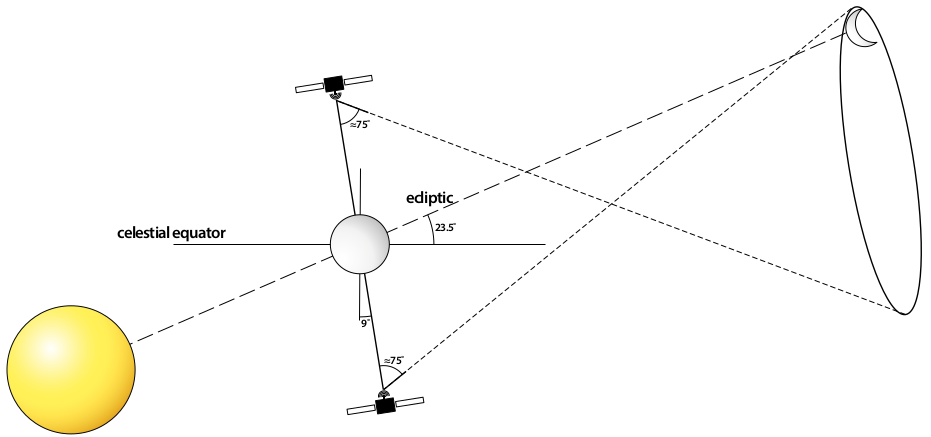
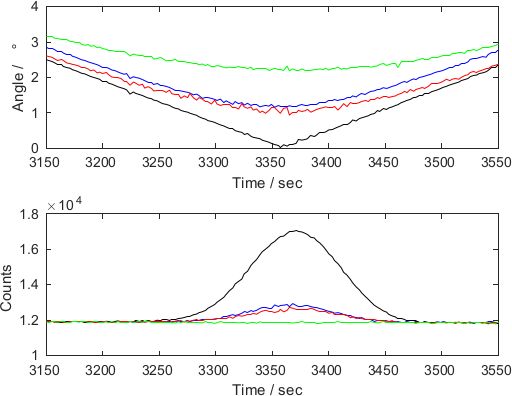
Weather satellites on polar orbits observe the Moon automatically from time to time, because every scan of a sounding instrument does not only sweep over the Earth but also over reference sources with high and low flux. The latter is usually provided by cold space, i. e. the cosmic microwave background. Its flux is always measured far from Earth and Sun, but this means that occasionally the Moon moves through the field of view (see Fig. 1). A model of its disk-integrated brightness temperature has been developed by Mo and Kagawa (2007) in order to subtract its contribution to the overall flux received so that the standard calibration routine remained valid. This is particularly important for AMSU-A, where up to a third of the scans in one orbit can be contaminated by the Moon. With MHS (Microwave Humidity Sounder, Goodrum et al., 2014), however, because of the smaller beam width and the deep space view (DSV) being closer to nadir, the intrusions of the Moon last only of the order three minutes (see Fig. 2).
Figure 1: Viewing direction of the Deep Space View (DSV, short dashed line) compared to the celestial equator and the ecliptic plane (long dashed line). For simplicity, the slight tilt of the Moon’s orbit against the ecliptic is not displayed. The DSV direction has a typical angle α ≈ 75° against nadir and describes a circle in the sky during one orbit.Figure 2. Moon intrusion event with MHS on MetOp-A on Sep 19, 2008 around 22:32 (UT); blue: DSV 1, black: DSV 2, red: DSV 3, green: DSV 4. Top: angle between Moon and space view. Bottom: space view count. In this example the calculated minimum angle and the measured maximum signal in DSV 2 occur five scans apart, and DSV 1 gives more signal than DSV 3, although its approach to the Moon was calculated to be less close.
The model for the Moon’s brightness temperature is based on the data from the microwave sounders themselves, therefore this natural satellite cannot serve as an absolute reference for these instruments. As the properties of its surface do not change with time, however, it can be used for inter-calibration and checks of the photometric stability. By considering only intrusion events where the Moon moves through the center of the deep space view, and by correcting for changes in its phase angle and distance from the Earth, it becomes possible to reduce the errors in its calculated flux due to periodic variations to about 2%. Dedicated maneuvers enabling observations far apart in time but at the same phase and ideally similar libration of the Moon can be expected to improve this value considerably.
The maximum signal of the Moon is best determined by fitting a Gaussian to its light curve. This fit does not only provide information about the gain and the beam pattern, but its exact position in time gives also some idea of the pointing accuracy. It follows from the time difference Δ between the maximum of the light curve and the minimum of the angular distance between the DSV and the Moon, as calculated with the ATOVS and AVHRR Pre-processing Package, by simple multiplication with ω, the angular velocity of the deep space view in the sky:
ω = 360° · sin(90° – α)/P
where α is the distance of the DSV direction from nadir, and P is the orbital period. The following table gives as an example some values for MHS on MetOp-A:
Year
mean Δ
σ(Δ)
σm(Δ)
Intrusions considered
Jan/Feb 2007
0.11°
0.14°
0.023°
36
Jan/Feb 2015
0.00°
0.12°
0.018°
43
Both the mean and the scatter of the difference between the calculated DSV position and the actual pointing along the scan direction is here smaller than the uncertainty of 0.3° claimed in the MHS Level 1 Product Generation Specification.
The stronger the signal of the Moon is compared to the one from the internal black body, the tighter are the constraints it can put on the stability of flux calibration and pointing accuracy. This makes it particularly interesting for the Ice Cloud Imager and the Microwave Imager (Alberti et al., 2012) on MetOp-SG, where it will almost fill the FWHM of the beam. More details on the appearances of the Moon in the deep space views and the limiting factors of the measurement accuracy can be found in Burgdorf et al. (2016).
The FIDCUEO project can benefit from findings obtained with Moon intrusions as well, because they provide a check of instrument parameters in flight that is difficult to obtain otherwise. An example is the beam width, which is the product of ω and the duration of the Moon intrusion. In addition, deviations from a symmetric light curve are a means to identify anomalies in the beam patterns, with consequences for the accuracy of inter-calibration that is based on simultaneous observations of the same Earth scene by different instruments.
References
Alberti, G., et al.: TWO Microwave Imaging radiometers for MetOp Second Generation, Proc. of the 2012 CNIT Tyrrhenian Workshop, 2012.
Burgdorf, M., et al.: The Moon as a photometric calibration standard for microwave sensors, Atmos. Meas. Tech., 9, 3467-3475, doi:10.5194/amt-9-3467-2016, 2016.
Goodrum, G., et al.: NOAA KLM user’s guide – August 2014 Revision, Tech. rep., National Environmental Satellite, Data, and Information Services, 2014.
Mo, T., and Kigawa, S.: A study of lunar contamination and on-orbit performance of the NOAA 18 Advanced Microwave Sounding Unit, J. Geophys. Res., 112, D20124, doi: 10.1029/2007JD008765, 2007.